Research Interests
- 🕊 Swarm Reinforcement Learning
- 📐 Graph Neural Networks and Geometric Deep Learning
- 🦜 (Versatile) Reinforcement Learning from Human Feedback
Publications
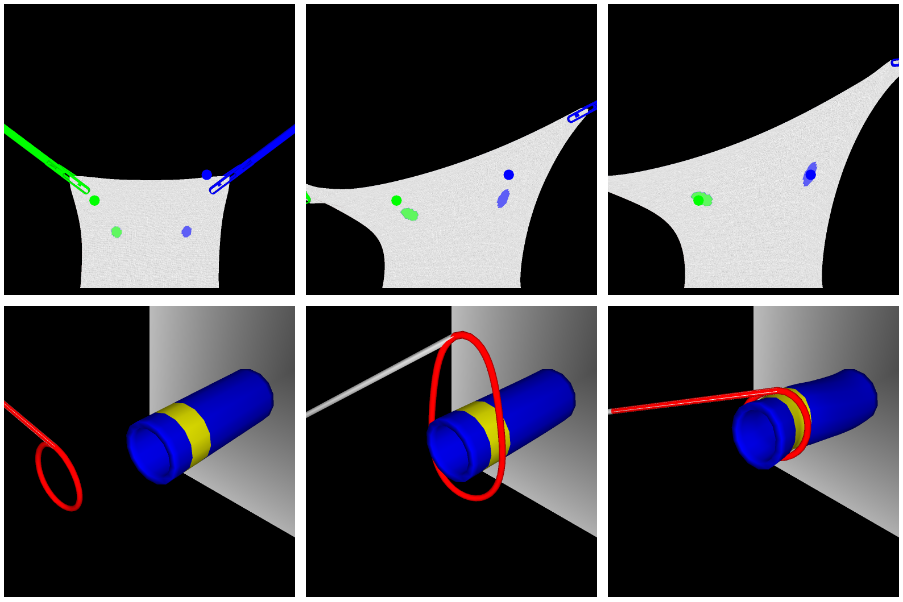
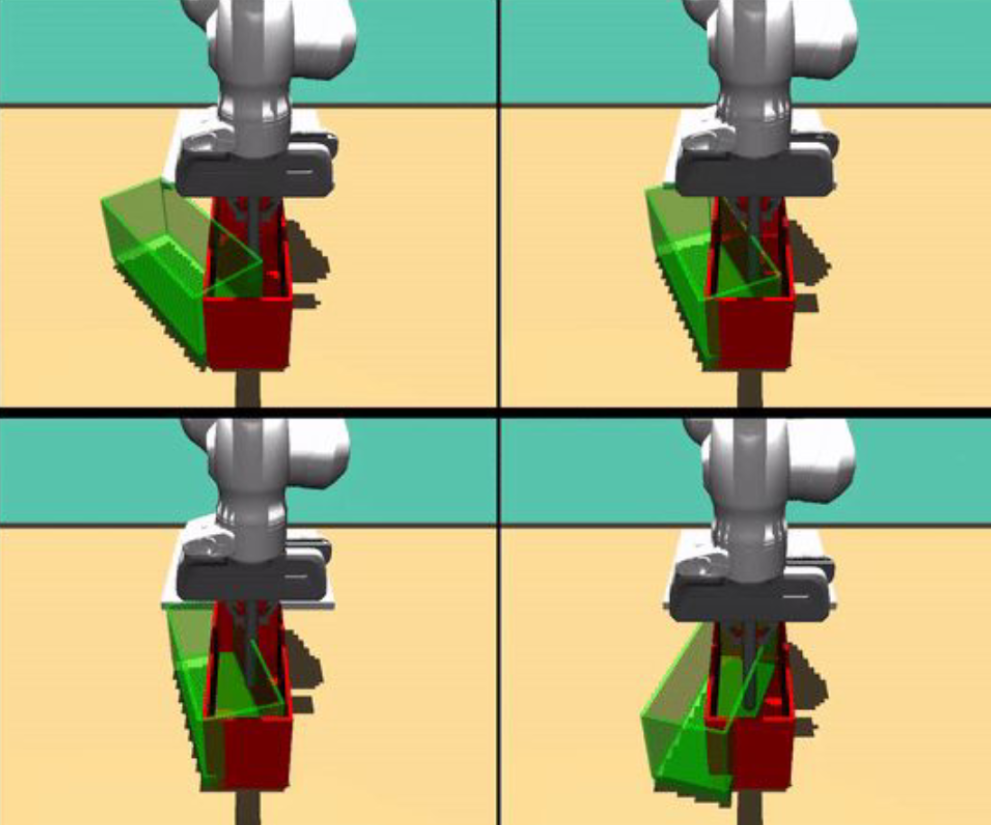
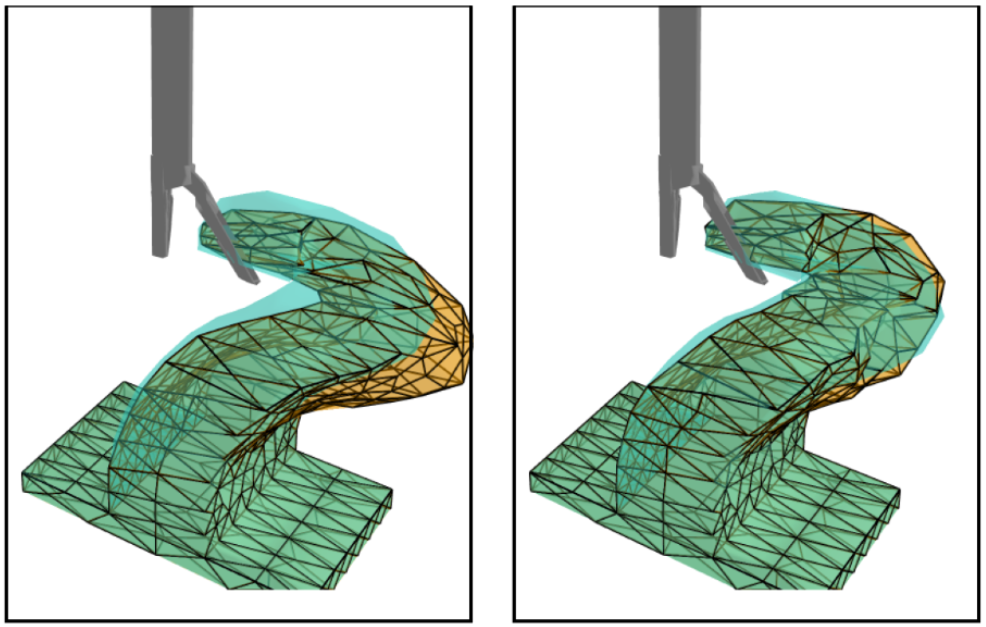
Movement Primitive Diffusion: Learning Gentle Robotic Manipulation of Deformable Objects.
IEEE Robotics and Automation Letters (RA‑L), 2024.
Scheikl, P. M., Schreiber, N., Haas, C., Freymuth, N., Neumann, G., Lioutikov, R., & Mathis-Ullrich, F.
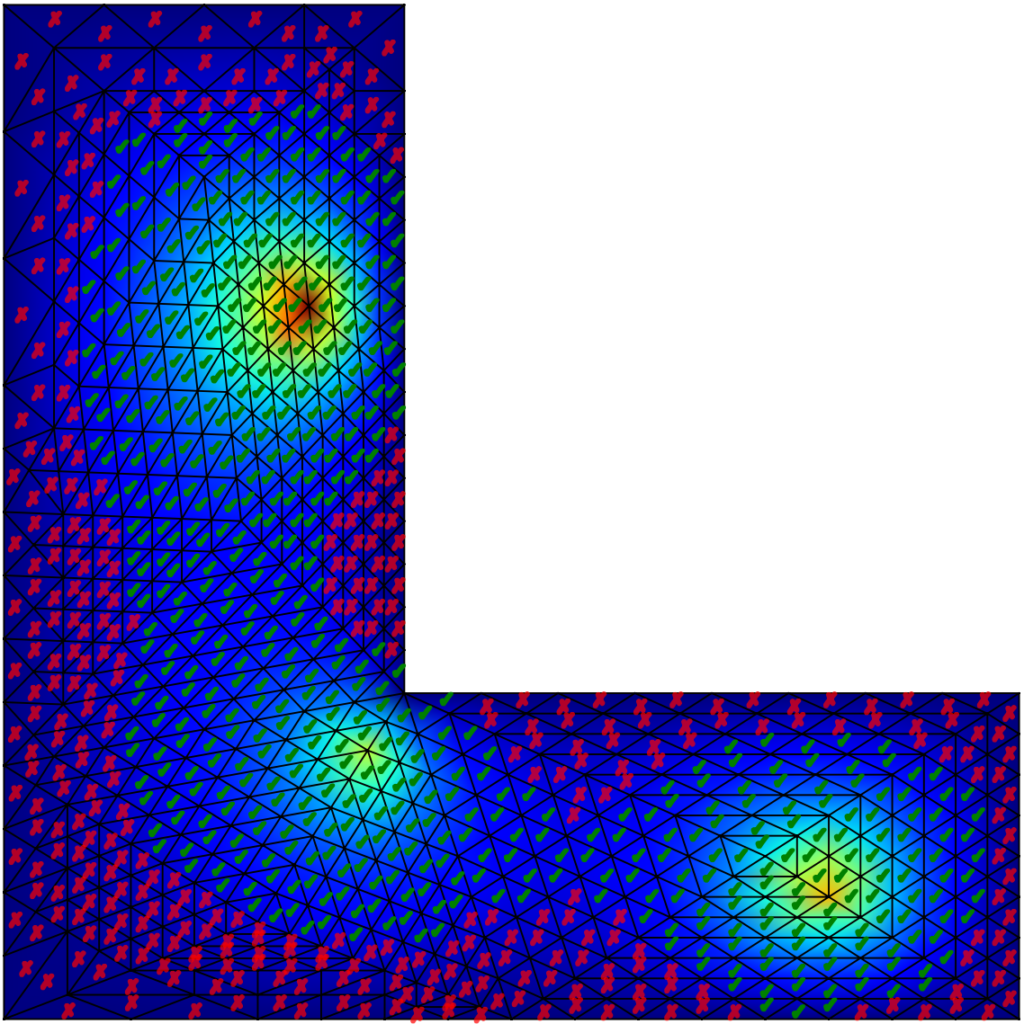
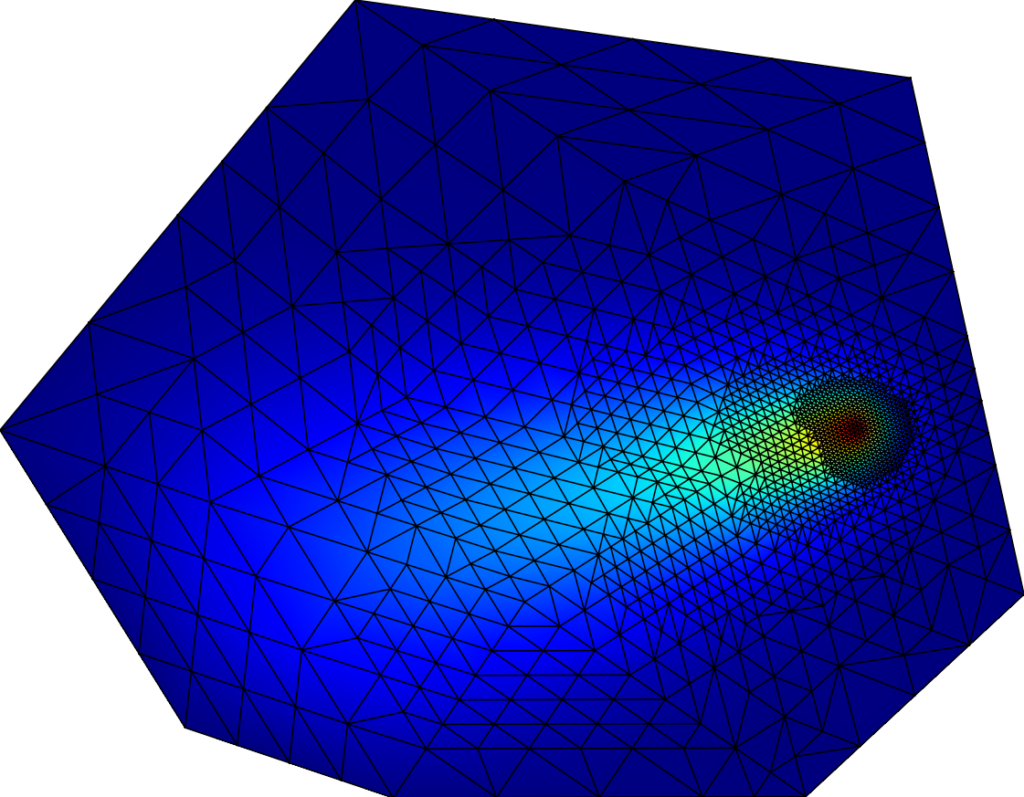
Swarm Reinforcement Learning for Adaptive Mesh Refinement.
36th Neural Information Processing Systems (NeurIPS), 2023.
N. Freymuth, P. Dahlinger, T. Würth, S. Reisch, L. Kärger, G. Neumann
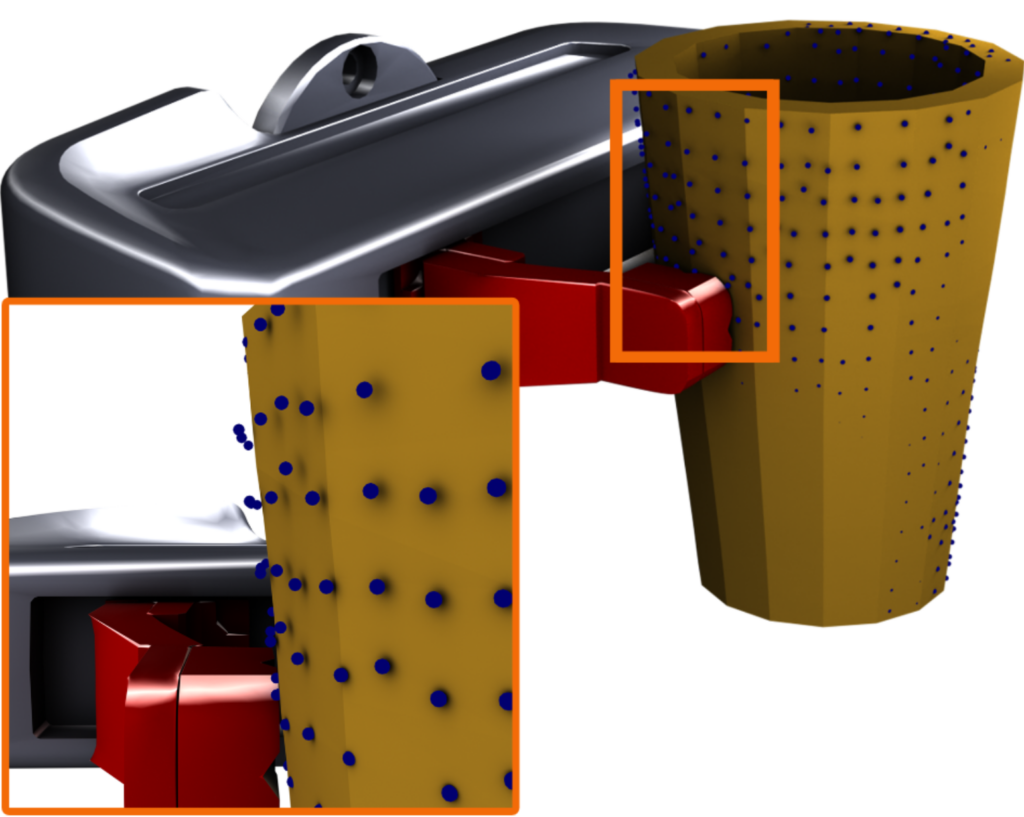
Grounding Graph Network Simulators using Physical Sensor Observations.
11th International Conference on Learning Representations (ICLR), 2023.
J. Linkerhägner, N. Freymuth, P.M. Scheikl, F. Mathis-Ullrich, G. Neumann
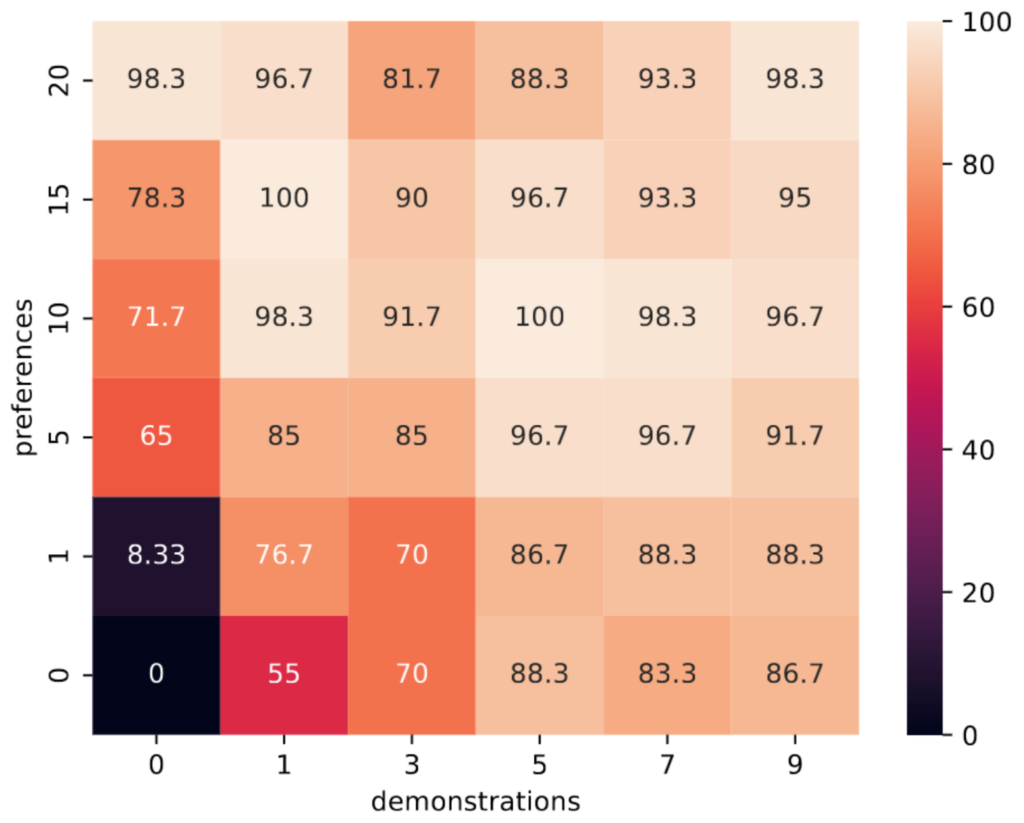
Adversarial Imitation Learning with Preferences.
11th International Conference on Learning Representations (ICLR), 2023.
A. Taranovic, A.G. Kupcsik, N. Freymuth, G. Neumann
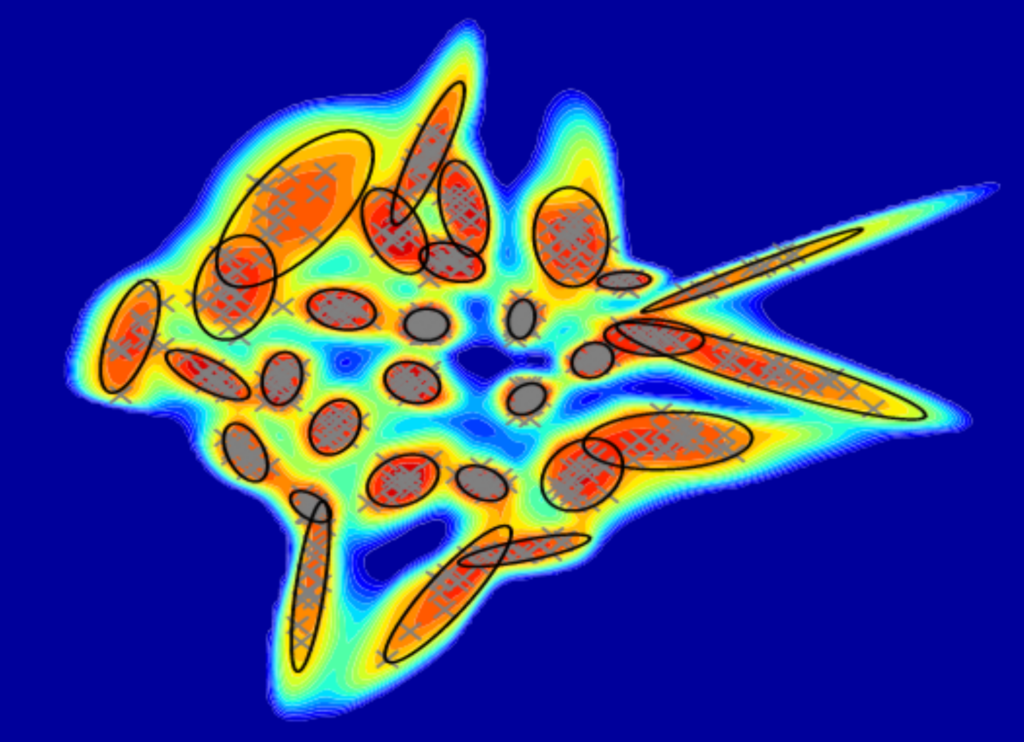
Inferring Versatile Behavior from Demonstrations by Matching Geometric Descriptors.
6th Conference on Robot Learning (CoRL), 2022.
N. Freymuth, N. Schreiber, P. Becker, A. Taranovic, G. Neumann
Workshops
Latent Task-Specific Graph Network Simulators. AI4Science Workshop at Neural Information Processing Systems (NeurIPS), 2023.
P. Dahlinger, N. Freymuth, M. Volpp, T. Hoang, G. Neumann
Swarm Reinforcement Learning for Adaptive Mesh Refinement (v1). Workshop on Physics for Machine Learning at International Conference on Learning Representations (ICLR), 2023.
N. Freymuth, P. Dahlinger, T. Würth, L. Kärger, G. Neumann
Versatile inverse reinforcement learning via cumulative rewards. 4th Robot Learning Workshop at Neural Information Processing Systems (NeurIPS), 2021.
N. Freymuth, P. Becker, and G. Neumann
Theses Supervision and Teaching
Bachelor’s Theses
- Autonomous Partitioning of Heterogeneous Swarm Systems
- Episodic Versatile Imitation Learning via Geometric Feature Matching
- Representation-Invariant Latent Spaces for Imitation Learning from Observation
- Swarm Reinforcement Learning with Graph Neural Networks
Teaching
- Teaching Assistant for the “Reinforcement Learning” Lecture @ KIT
- Seminar and Praktikum “Robot Learning” @ KIT
Misc. Projects
- Efficient Swarm Reinforcement Learning from Human Feedback
- Spatial Credit Assignment for Swarm Reinforcement Learning
Master’s Theses
- Adaptive Mesh HP-Refinement with Swarm Reinforcement Learning
- Explainable Graph Neural Networks for Autonomous Driving
- Explainable Graph Neural Networks for Traffic Routing
- Graph Diffusion for Adaptive Mesh R-Refinement
- Adaptive Mesh Refinement from Human Feedback
- Variational Swarm Reinforcement Learning for Predictive Models of Deformable Objects
- Reinforcement Learning for Deformable Object Manipulation
- Swarm Reinforcement Learning in Limited Visibility with Graph Neural Networks
- Physical Simulation from Observation using Graph Neural Networks
- RippleNet: A remote message passing method for Graph Neural Networks